7.16.18 MC_GearInPos
Function
This function block is the ratio between the position of the slave axis and the master axis starting from the synchronization point.
LD graphics
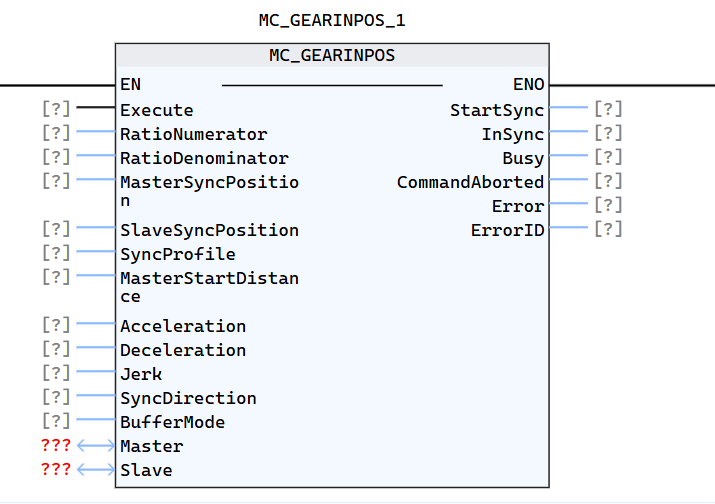
Parameter description
| Parameters | Type | Declaration | Description | Remarks |
|---|---|---|---|---|
| Master | AXIS | VAR_IN_OUT | Principal axis | Invoke Function Block |
| Slave | AXIS | VAR_IN_OUT | Slave axis | Invoke Function Block |
| Execute | BOOL | VAR_IN | Rising edge on mode | |
| RatioNumerator | DINT | VAR_IN | Transmission ratio molecule | |
| RatioDenominator | DINT | VAR_IN | Transmission ratio denominator | |
| MasterSyncPosition | LREAL | VAR_IN | The synchronization position of the master axis | |
| SlaveSyncPosition | LREAL | VAR_IN | Slave axis synchronization position | |
| SyncProfile | INT | VAR_IN | Configuration file for the synchronization process | SyncProfile = 0 The slave axis starts to synchronize with the master axis at the “MasterStartDistance” position; when the master axis reaches the “MasterSyncPosition” position and the slave axis.Synchronization is completed when the master axis reaches the “MasterSyncPosition” position and the slave axes reach the “SlaveSyncPosition” position at the same time. SyncProfile = 1 When the slave axis is in the “MasterSyncPosition” position, the slave axis starts to synchronize with the master axis; synchronization is completed when the master axis reaches the "MasterSyncPosition" and "MasterStartDistance" position, and the slave axis reaches "SlaveSyncPosition" position at the same time, the synchronization is completed |
| MasterStartDistance | LREAL | VAR_IN | Master position/distance when slave axis starts synchronization | |
| Acceleration | LREAL | VAR_IN | Transmission acceleration[u/s2] | |
| Deceleration | LREAL | VAR_IN | Transmission deceleration[u/s2] | |
| Jerk | LREAL | VAR_IN | Transmission jerk[u/s3] | |
| SyncDirection | INT | VAR_IN | Synchronization direction of slave axis | |
| BufferMode | USINT | VAR_IN | Define the time sequence of FB: 0 means to immediately abort the ongoing movement (default value); 1 means to affect the axis when the last movement is "complete" | |
| StartSync | BOOL | VAR_OUT | Initiate the transmission device operation | |
| InSync | BOOL | VAR_OUT | Synchronization completed | |
| Busy | BOOL | VAR_OUT | Whether there is a valid output for FB, True:FB is not terminated | |
| CommandAborted | BOOL | VAR_OUT | The command was terminated by another command | |
| Error | BOOL | VAR_OUT | An error signal has occurred within the FB | |
| ErrorID | WORD | VAR_OUT | Error ID |