7.16.6 MC_MOVEABSOLUTE
Function
Controls movement to a specified absolute position. (Home Status needs to be set before)
LD graphics
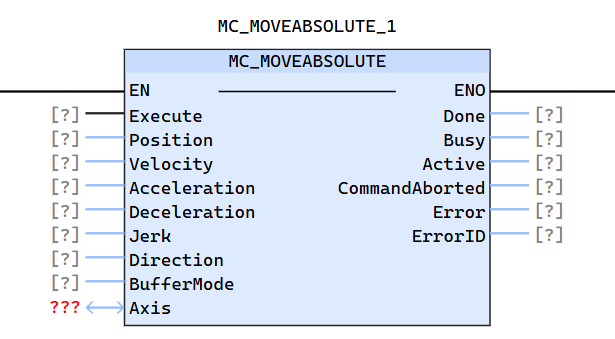
Parameter description
| Parameters | Type | Declaration | Description | Remarks |
|---|---|---|---|---|
| Axis | AXIS | VAR_IN_OUT | System axis for executing commands | Invoke Function Block |
| Execute | BOOL | VAR_IN | Rising edge activation | |
| Position | LREAL | VAR_IN | The absolute position when the signal was detected[u] | |
| Velocity | LREAL | VAR_IN | Maximum speed [u/s], which can be a signed value | |
| Acceleration | LREAL | VAR_IN | Acceleration[u/s2] | |
| Deceleration | LREAL | VAR_IN | Deceleration[u/s2] | |
| Jerk | LREAL | VAR_IN | Jerk[u/s3] | |
| Direction | USINT | VAR_IN | there are three kinds of MC direction: positive direction, negative direction and current direction.When the modulus function is on, the direction should be positive, negative and shortest path direction. | |
| BufferMode | USINT | VAR_IN | Define the time sequence of FB: 0 means to immediately abort the ongoing movement (default value); 1 means to affect the axis when the last movement is "complete" | |
| Done | BOOL | VAR_OUT | Reach command distance | |
| Busy | BOOL | VAR_OUT | Whether there is a valid output for FB, True:FB is not terminated | |
| Active | BOOL | VAR_OUT | FB control axis | |
| CommandAborted | BOOL | VAR_OUT | The command was terminated by another command | |
| Error | BOOL | VAR_OUT | An error signal has occurred within the FB | |
| ErrorID | WORD | VAR_OUT | Error ID |