7.16.8 MC_HALT
Function
Control movement stops. The axis is moved to Discrete Motion until the velocity is zero. After the "Done" output is set, the state is transferred to the "quiescent" state.
LD graphics
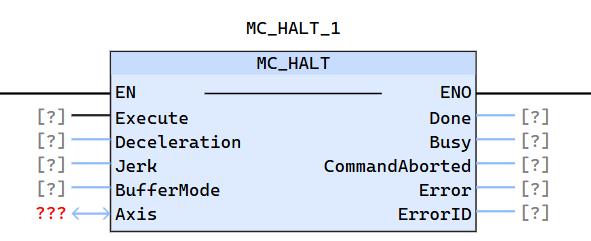
Parameter description
| Parameters | Type | Declaration | Description | Remarks |
|---|---|---|---|---|
| Axis | AXIS | VAR_IN_OUT | System axis for executing commands | Invoke Function Block |
| Execute | BOOL | VAR_IN | Rising edge activation | |
| Deceleration | LREAL | VAR_IN | Deceleration[u/s2] | |
| Jerk | LREAL | VAR_IN | Jerk[u/s3] | |
| BuffferMode | USINT | VAR_IN | Define the time sequence of FB: 0 means to immediately abort the ongoing movement (default value); 1 means to affect the axis when the last movement is "complete" | |
| Done | BOOL | VAR_OUT | Reaching zero speed | |
| Busy | BOOL | VAR_OUT | Whether there is a valid output for FB, True:FB is not terminated | |
| CommandAborted | BOOL | VAR_OUT | The command was terminated by another command | |
| Error | BOOL | VAR_OUT | An error signal has occurred within the FB | |
| ErrorID | WORD | VAR_OUT | Error ID |