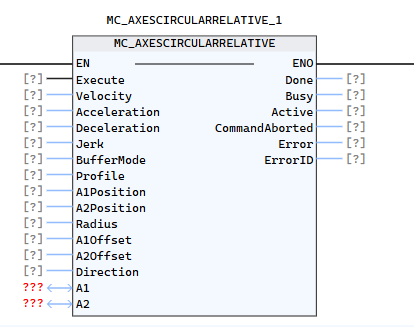
7.17.3 MC_AxesCircularRelative
Function
This Function Block commands a controlled motion to a specified endpoint (relative to startpoint) for two axes with a circular path.
LD graphics
Parameter description
| Paramerters | Type | Declaration | Description | Remarks |
|---|---|---|---|---|
| A1 | AXIS | VAR_IN_OUT | The selected axis A1 to execute command | Invoke Function Block |
| A2 | AXIS | VAR_IN_OUT | The selected axis A2 to execute command | Invoke Function Block |
| Execute | BOOL | VAR_IN | Start the motion at rising edge | |
| A1Postion | LREAL | VAR_IN | Commanded relative position for Axis A1 | 1.User Unit. 2. Can't exceed the setting range in Axis Configuration. 3. Velocity is angular velocity, not for single axis. |
| A2Position | LREAL | VAR_IN | Commanded relative position for Axis A2 | |
| Velocity | LREAL | VAR_IN | Value of the maximum velocity [u/s]. Can be a signed value. | |
| Acceleration | LREAL | VAR_IN | Value of the acceleration [u/s2]. | |
| Deceleration | LREAL | VAR_IN | Value of the deceleration [u/s2]. | |
| Jerk | LREAL | VAR_IN | Value of the Jerk [u/s3]. | |
| BufferMode | USINT | VAR_IN | Defines the chronological sequence of the FB. 0: aborting an ongoing motion immediately (default).1: affects the axis as soon as the previous movement is 'Done' | |
| Profile | USINT | VAR_IN | 0: move with a circular path (path is defined by A1CurrentPosition/A2CurrentPosition, A1Position/A2Position and Radius). 1: move with a circular path (path is defined by A1CurrentPosition/A2CurrentPosition, A1Position/A2Position and A1Offset/A2Offset) | |
| Radius | LREAL | VAR_IN | Value of arc radius (u).used for Profile = 0 only1. User Unit. 2. Can't exceed the setting range in Axis Configuration. | |
| A1Offset | LREAL | VAR_IN | Offset value of circular center (compare with A1 current position).used for Profile = 1 only | |
| A2Offset | LREAL | VAR_IN | Offset value of circular center (compare with A2 current position).used for Profile = 1 only | |
| Direction | USINT | VAR_IN | 0: move in clock-wise direction 1: move in counter clock-wise direction | |
| Done | BOOL | VAR_OUT | Commanded position reached | |
| Busy | BOOL | VAR_OUT | True: The FB is not finished | |
| Active | BOOL | VAR_OUT | Indicates the FB has control on the axis | 1. If non buffer-mode, Active is set when the FB is executed and reset when the FB is done. 2. If buffer-mode, Active is set when the FB has control on the axis |
| CommandAborted | BOOL | VAR_OUT | 'Command' is aborted by another command | |
| Error | BOOL | VAR_OUT | Signals that an error has occurred within the FB | |
| ErrorID | WORD | VAR_OUT | Error ID | NOTE: FB Shall report an error if can't plan an arc path. |