7.16.18 运动控制-GearInPos
功能
从同步点开始计算从动轴和主动轴的位置比
LD图形
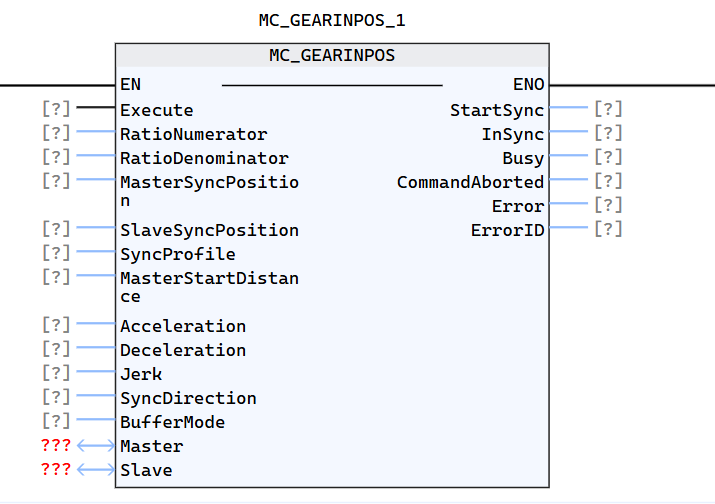
参数说明
| 参数 | 类型 | 声明 | 描述 | 备注 |
|---|---|---|---|---|
| Master | AXIS | VAR_IN_OUT | 主轴 | |
| Slave | AXIS | VAR_IN_OUT | 从轴 | |
| Execute | BOOL | VAR_IN | 上升沿启动 | |
| RatioNumerator | DINT | VAR_IN | 传动比分子 | |
| RatioDenominator | DINT | VAR_IN | 传动比分母 | |
| MasterSyncPosition | LREAL | VAR_IN | 主轴的同步位置 | |
| SlaveSyncPosition | LREAL | VAR_IN | 从轴的同步位置 | |
| SyncProfile | INT | VAR_IN | 同步进程的配置文件 | SyncProfile = 0 从动轴在 “MasterStartDistance(主启动距离)”位置时开始与主轴同步,当主轴到达 “MasterSyncPosition(主同步位置)”位置且从动轴同时到达 “SlaveSyncPosition(从同步位置)”位置时,同步完成; SyncProfile = 1 当从动轴位于 “MasterSyncPosition(主同步位置)”��位置时,从动轴开始与主轴同步;当主轴到达 “MasterSyncPosition(主同步位置)+ MasterStartDistance(主启动距离)”位置,且从动轴同时到达 “SlaveSyncPosition(从同步位置)”位置时,同步完成。 |
| MasterStartDistance | LREAL | VAR_IN | 从轴开始同步时的主位置/距离 | |
| Acceleration | LREAL | VAR_IN | 传动加速度[u/s2] | |
| Deceleration | LREAL | VAR_IN | 传动减速度[u/s2] | |
| Jerk | LREAL | VAR_IN | 传动加加速度[u/s3] | |
| SyncDirection | INT | VAR_IN | 从轴的同步方向 | |
| BufferMode | USINT | VAR_IN | 定义FB的时间顺序: 0表示立即中止正在进行的运动(默认值); 1表示在上一次运动为“完成”时影响轴 | |
| StartSync | BOOL | VAR_OUT | 指令传动装置启动 | |
| InSync | BOOL | VAR_OUT | 同步已经完成 | |
| Busy | BOOL | VAR_OUT | FB是否存在有效输出,True:FB没有结束 | |
| CommandAborted | BOOL | VAR_OUT | 表示该命令被其他命令终止 | |
| Error | BOOL | VAR_OUT | FB内发生错误的信号 | |
| ErrorID | WORD | VAR_OUT | 错误识别码 |